this sounds poetic!
The absence of a lander in the fall is proof that it has lost control of the Moon.
The absence of a lander in the fall is proof that it has lost control of the Moon.
Let FAC do their thing and ISRO plan for the new lander.A Deshmukh wrote:Since we dont have a Orbiter, can we send 2 Landers? one are the equatorial plane, and the other at South pole. Both of them can communicate via CY2.
SSSalvi wrote:^^^
From same report some useful snippets: ( It seems to have been written before the catastrophe.
...
“A very large component of lander is fuel tank. When lander accelerates, decelerates, because of inertia, the liquid fuel gets into sloshing, akin to splashing of water in a tub.
If( Sloshing becomes severe as more and more fuel depletes in fuel tank) ------ It may so happen that engine nozzle feed will be starved of fuel resulting in uncontrolled throttling.
“The first phase of braking phase lasts from 30 km altitude to 400 m altitude where velocity is reduced from 1.66 km/sec (6,000 km/hr) to 60 m/sec (200 km/ hour). “Orientation of lander is changed from horizontal to vertical. Throughout this period four corner thrusters are operated to brake and central thruster is switched off.
“At 400 m height, the second phase of braking starts. The lander is vertical, two of four corner thrusters are switched off simultaneously and two diagonal thrusters are switched on.
...
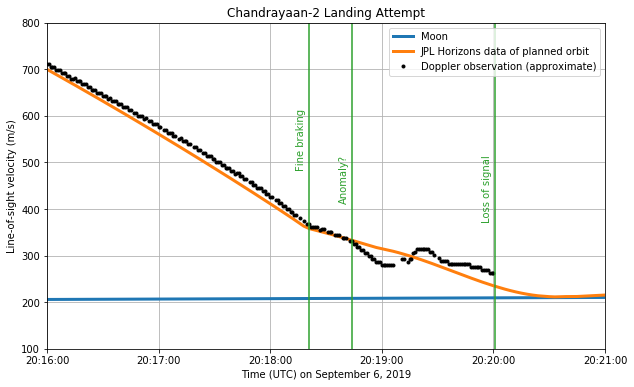
This zoom-in of the #Chandrayaan2 lander doppler observations show that the start of the fine braking phase seems to have gone according to plan (at 20:18:20 UTC), and something unexpected happened 15 seconds into the fine braking phase.
Source: https://github.com/tammojan/satellite_a ... ding.ipynb …
I want to get terminology right.“There were two phases of lunar descent -- Braking and hovering.
The lander Vikram has five big (800 Newton) thrusters and eight small thrusters.
“The five big thrusters are positioned as: four at corners and one at centre. The resultant thrust of four corner ones, if fired equally, will combine in vertical direction, providing opposing force and the resultant vertical axis of vector will pass through centre of gravity, providing stability.
“If an imbalance is created by throttling four engines, i.e. by varying fuel injection rate, the resultant force vector is not aligned to vertical axis of lander, creating one horizontal and vertical component.
generally, operation of four corner thrusters and the central thrusters is made exclusive to make things simple. Thrust vector of central one will also pass through centre of gravity, aiding stability. “Let us assume operation of simultaneous operation of four corner thrusters. Now if one or more of them are not operating simultaneously or there is imbalance in thrust output among them, the resultant uncompensated horizontal force will spin the lander in horizontal plane.
“In that case, the resultant vertical force vector will also not pass through centre of gravity and resultant couple will trigger spinning in vertical plane.
In fact, the controlled spinning by throttling is used to aid programmed tilting of the lander in the braking phase. “If spinning in two orthogonal plane goes out of control, it will essentially tumble down the lander. Tumbling of lander with thrusters on, will make things very complex, like firework burnt in Diwali, called spinning wheel or ‘Charki’. “The result will be simultaneous tumbling and zig zag random motion of lander, beyond the control of on-board control system. So, throttling of the four thrusters is a critical activity.
“A very large component of lander is fuel tank. When lander accelerates, decelerates, because of inertia, the liquid fuel gets into sloshing, akin to splashing of water in a tub.
If( Sloshing becomes severe as more and more fuel depletes in fuel tank) ------ It may so happen that engine nozzle feed will be starved of fuel resulting in uncontrolled throttling.
“The first phase of braking phase lasts from 30 km altitude to 400 m altitude where velocity is reduced from 1.66 km/sec (6,000 km/hr) to 60 m/sec (200 km/ hour). “Orientation of lander is changed from horizontal to vertical. Throughout this period four corner thrusters are operated to brake and central thruster is switched off.
“At 400 m height, the second phase of braking starts. The lander is vertical, two of four corner thrusters are switched off simultaneously and two diagonal thrusters are switched on.
“By the time lander descends to 100 m, these two thrusters brake lander to reduce vertical speed from 60 m/sec at 400 m height to less than 2 m/sec at 100 m height. “The braking control from 30 km height to 100 m is carried out by a series of time tagged commands, loaded in the lander a few hours before operation from ground. They are generated based on precise measurement of lander orbit, prior to de-orbitting.
“When lander reaches 100 m height, the lander is three axis stabilised and it essentially floats. Moon’s gravity is compensated by upward thrust of two diagonal thrusters. “Small thrusters are used to move lander sidewise. The camera on lander takes photograph of lunar surface below. “The resultant image is matched with stored images of landing site (captured by high resolution camera of orbiter earlier) and horizontal movement of lander is controlled. By slowly reducing vertical thrust by central thruster, lander is slowly descended. “Radar altimeter keeps an eye on true altitude of the lander. This mode is called hovering mode. This is the most complex mode and fully autonomous.
“The ( hovering mode ) software is loaded prior to launch and it cannot be changed afterwards as in the case of braking mode which can be changed even a few hours before operation. “Just five seconds before landing, the two diagonal thrusters are switched off and central thruster is switched on. “It was apprehended that two corner thrusters, if active will blow the moon dust and it will create a centre jet upwards, covering the lander with dust. “So central thruster will reduce this upward jet. All landers need to be prepared to operate under dusty condition at the last moment of landing.”
Don't remember exactly (I just copied/pasted from LRO's archive database of images .. but I can see Manzinus (C) , IIRC Diameter of that is 25 Km. ( Look around 70 S, add 22 E in Moon's atlas)Vayutuvan wrote:any idea about at what scale that picture is? what is the 500 meter radius circle, for example?Amber G. wrote:For quick reference: Keep your eyes open..
Ramana Sir, I share your thoughts. Trajectory started showing significant deviations soon after the initiation of transition.ramana wrote: We know the lander descended from horizontal to vertical mode and communication was lost by 335m. So it was in the fine braking mode.
From the observed data there was some instability prior to this.
Indicates the transition was troublesome.
*Hydraulic systems are notorious for line transients.
Proportional valves are designed for small motions.
Its possible this one behaved non-linear and could be a major focus of FAC.
That red circle itself seems to the 0.5km radius circle. I simply scaled from the dia you gave for the Manzinuz crater.Amber G. wrote:Don't remember exactly (I just copied/pasted from LRO's archive database of images .. but I can see Manzinus (C) , IIRC Diameter of that is 25 Km. ( Look around 70 S, add 22 E in Moon's atlas)Vayutuvan wrote:
any idea about at what scale that picture is? what is the 500 meter radius circle, for example?
Why is bus necessary? The lander has all functions, so imho bus not needed.ramana wrote:Let FAC do their thing and ISRO plan for the new lander.A Deshmukh wrote:Since we dont have a Orbiter, can we send 2 Landers? one are the equatorial plane, and the other at South pole. Both of them can communicate via CY2.
Still need a bus to carry the lander and then de orbit.
Becozprashanth wrote:Ramana Sir, I share your thoughts. Trajectory started showing significant deviations soon after the initiation of transition.
But my doubt is, that if 800N engines had variable thrust capability, why were only two diagonal engines used for fine braking instead of lowering the thrusts of all four engines during the transition to achieve the same? I had assumed initially, switching from 4 to 2 diagonal engines was necessitated due to fixed thrust nature of retro engines, but the news link says otherwise.
Thanks.
Haridas wrote: Becoz
1. then range of throttable thrust is not very wide (say 50 to 100%, as against 10 to 100%).
2. After doing bulk of orbit deceleration during hard breaking phase, the mass of lander is greatly reduced (imho less than half compared to when it seperated from orbiter). Given reduced mass and almost no need for orbital deceleration, the total thrust requirement falls below 4 engine min throttle thrust. Hence turn off a pair of engines.
The news report hints that only 5th engine in center has significant throttling capabelity.
Thanks Haridas ji and Indranil Ji. This is new information to me.Indranil wrote:All five engines were identical. Rest you have got it right.
What kind of error UBji?UlanBatori wrote: Opens the possibility that there was an error in this final upload... lets see.
Yes, just a lander and rover should be enough for the next attempt - since the lander has the thrusters required for changing orbits.Haridas wrote:Why is bus necessary? The lander has all functions, so imho bus not needed.
Just saying that this was a step taken in high spirits as the mission went flawlessly. From my experience, I make lots of errors in such a frame of mind, versus the tension and anxiety of a critical moment where things are not going well.SaiK wrote:What kind of error UBji?UlanBatori wrote: Opens the possibility that there was an error in this final upload... lets see.
Why was it necessary to do this so late in the mission? Obviously because it had to be based on terrain and orbit data sent from the Orbiter or the Lander, wasn't it? How many reviews could that have gone through - unlike the basic, pre-loaded software? Is it possible that a crater edge there happened to be a lot taller than was realized? A magnetic field much stronger?You only live twice. Once when u r born, and once when Death Stares U In Da Face.
SaiK wrote:What kind of error UBji?UlanBatori wrote: Opens the possibility that there was an error in this final upload... lets see.
Nalla Baalu wrote: https://www.indiatoday.in/amp/magazine/ ... ssion=true
Raj Chengappa (appears like he bides his time nowadays to write only on 'epochal' events) alludes to potential trouble during 'Absolute Navigation Phase' that was to last less than a minute to correct any residual errors of rough braking phase. ....
andIn the first phase, known as the Rough Braking Phase and lasting for 10 minutes 20 seconds, Vikram would use the brute force of its engines to brake its horizontal speed of 1,648 metres per second down to around 150 metres per second. In this phase, it would come down from 30 km to 7.4 km. While detaching from the orbit and independently revolving around the moon, Vikram was ejected with the exhaust funnels of its five engines facing the direction of its revolution instead of on the opposite side. At the beginning of the descent phase, its onboard computers ignited four of the five engines to steadily kill its velocity. To ensure that both the craft’s horizontal and vertical velocities were within parameters, all four engines had to fire with perfect synchronicity. If one of the engines deviated, the computer was pre-programmed to use the other engines to provide differential thrusts to correct the anomaly.
The live telecast by Doordarshan showed scientists clapping at the completion of the Rough Braking Phase, indicating it was successful. But some experts believe that there are indications that errors may have been building up in this phase. For while the horizontal velocity (the speed the craft was moving at) was to be around 150 metres per second at the end of the phase, the readings on the large console in the mission operations complex showed that it was around 200 metres per second, faster than what it should have been. On the other hand, the vertical velocity or the speed with which the lander was descending, hovered between 70 metres and 68 metres per second for several seconds.
It was at the brief ANP phase that the anomalies in Vikram’s powered descent began to mount. In the control room, the large console simulating Vikram’s descent showed the lander deviating from its 45-degree inclination. It inexplicably executed a somersault, making the engines face upwards instead of downwards (see graphic: 15 Minutes to Despair). One explanation is that the onboard computer was correcting the spacecraft’s attitude to enable the cameras to position it properly for taking the pictures it needed to calibrate vital parameters. But that manoeuvre went haywire and resulted in increasing the vertical descent velocity rather than decreasing it. The other explanation is that the control system noticed a drop in the velocity and corrected it even though it was still within the threshold. In doing so, it first erroneously rotated the craft by 140 degrees to boost the velocity, then reversed it to the original position. By then, the spacecraft had lost its orientation and control.
According to experts, Vikram’s abrupt end can be attributed to three major reasons, but they do not quite agree which one was the main culprit. Some believe that the 1) propulsion systems malfunctioned during the transition from the Rough Brake Phase to the Absolute Navigation Phase when the engines were to fire synchronously to reduce the lander’s speed. Since the throttle-able engines were based on a new technology, there is the suspicion that one of them could have misfired, causing unstable conditions beyond the system’s tolerance, and confused the command and control system. Others believe 2) the error lay in the control system itself, with an improper logic built in, that made the lander do a complete turn during the transition between the absolute navigation and fine braking phases. Yet another section of opinion argues that it was a 3) combination of errors in both propulsion and control systems that led to the setback. Meanwhile, ISRO scientists are gathering every bit of data the lander transmitted before its signal was lost. They are using such data to simulate all possible scenarios and explain Vikram’s aborted landing.
Too many other details to quote.DFSAR is a lightweight radar operating in S and L band (used for the first time on the moon). It's a follow-up of MiniSAR experiment of Chandrayaan-1. MiniSAR was an S-band synthetic aperture radar supplied by NASA. Weight and power are always constraining factors when it comes to planetary missions. The entire SAR instrument package of C2 orbiter weighs only 15 kg. To ensure high efficiency, the transmitter package of the radar uses Gallium Nitride (GaN) based solid-state power amplifier (SSPA) chain. The transmit chain feeds to a planner-microstrip array antenna of dimensions 1.35x1.1 m. The antenna is capable of transmitting in both L and S bands simultaneously. DFSAR has a maximum resolution of 2 meters from varying incidence angles. The SAR data provided by DFSAR instrument will facilitate the study of surface and subsurface properties of the lunar regolith. Furthermore, high ground-penetration capability of L-band frequencies will be useful for subsurface water-ice detection and estimation.
What to write when there is no further info. They are trying to communicate and its not connecting. Everyone knows that.Arjun wrote:Vikram’s quiet because it can’t talk! But Isro?
Why would we want to hide any enhanced camera capability? This is being used on the moon to enhance the knowledge of humanity...This has no military uses nor about snooping on any other country. Besides, the 30cm resolution capability is already publicized...so share some snaps of Vikram at that resolutionprasannasimha wrote:They will not release detailed images as this will give an idea of our 2 point discrimination capability. May be a later degraded image. The orbiter is working very well.
Arjun wrote:Why would we want to hide any enhanced camera capability? This is being used on the moon to enhance the knowledge of humanity...This has no military uses nor about snooping on any other country. Besides, the 30cm resolution capability is already publicized...so share some snaps of Vikram at that resolutionprasannasimha wrote:They will not release detailed images as this will give an idea of our 2 point discrimination capability. May be a later degraded image. The orbiter is working very well.
Because that is the declared number. Many of these are dual use technology.Arjun wrote:Why would we want to hide any enhanced camera capability? This is being used on the moon to enhance the knowledge of humanity...This has no military uses nor about snooping on any other country. Besides, the 30cm resolution capability is already publicized...so share some snaps of Vikram at that resolutionprasannasimha wrote:They will not release detailed images as this will give an idea of our 2 point discrimination capability. May be a later degraded image. The orbiter is working very well.
Arjun wrote:Vikram’s quiet because it can’t talk! But Isro?
Then no reason to have CY2 when you can’t release pics. Better to use those funds for improved spy satellites.chetak wrote:Arjun wrote: Why would we want to hide any enhanced camera capability? This is being used on the moon to enhance the knowledge of humanity...This has no military uses nor about snooping on any other country. Besides, the 30cm resolution capability is already publicized...so share some snaps of Vikram at that resolution
what if this camera has mil applications and is being/will be used in another satellite.
this knowledge of humanity bit has limitations. Except in very general terms, no one shares anything of dual use value
Everyone has opinions but, in this case, ISRO may be the one to decide.Mort Walker wrote:Then no reason to have CY2 when you can’t release pics. Better to use those funds for improved spy satellites.chetak wrote:
what if this camera has mil applications and is being/will be used in another satellite.
this knowledge of humanity bit has limitations. Except in very general terms, no one shares anything of dual use value