Some more info on the updation rate of the elevator actuator. if you refer to this document "APPLICATION OF MULTIVARIABLE -CONTROL THEORY TO AIRCRAFT CONTROL LAWS" page 116 shows a graph of the commands to the actuator in simulation, but this is a high fidelity simulation as this report was released by wright patterson airforce laboratory ( I dont know how to paste the figure sorry, even though it is a USAF document it is available in the public domain) and one can see from there that the actuator signal is updated at a much higher rate, also remember the time constant of the f-16 elevator actuator is around 50 ms which means the elevator deflection reaches 67.8% of the input actuator command in 50 ms
I like this report as it details the problems inherently associated with flight control. You should be able to google the document, if anybody is interested I can forward you the same.
LCA news and discussion
Re: LCA news and discussion
Vina
They need to be 0.5 seconds apart since the elevator can move only twice a second.
According to the earlier post "The surfaces move about a couple of times per second". This implies that the elevator can attain only two discrete positions in a second. I am of the opinion that that is too small and the rate should be higher at least around "20 discrete positions a second"
Now the scenario that you present about the deflections 0.8 seconds apart is worse than the 0.5 seconds since the elevator deflection changes after a time delay of 0.8 seconds which unfortunately is a large time delay and this would cause a departure from controlled flight.
I am not sure how to update an image as I feel I may be able to clarify this better with a picture
I dont know how many of you have observed the aileron's on an Airbus 320/340 when it is on the ground and is going through its built in test of the flight control software, you can see that the aileron deflects at a much higher rate than 2 hz. If you have not seen it next time you fly get a window seat near the wing and observe it, it looks amazing and you can be that much more confident while flying
They need to be 0.5 seconds apart since the elevator can move only twice a second.
According to the earlier post "The surfaces move about a couple of times per second". This implies that the elevator can attain only two discrete positions in a second. I am of the opinion that that is too small and the rate should be higher at least around "20 discrete positions a second"
Now the scenario that you present about the deflections 0.8 seconds apart is worse than the 0.5 seconds since the elevator deflection changes after a time delay of 0.8 seconds which unfortunately is a large time delay and this would cause a departure from controlled flight.
I am not sure how to update an image as I feel I may be able to clarify this better with a picture
I dont know how many of you have observed the aileron's on an Airbus 320/340 when it is on the ground and is going through its built in test of the flight control software, you can see that the aileron deflects at a much higher rate than 2 hz. If you have not seen it next time you fly get a window seat near the wing and observe it, it looks amazing and you can be that much more confident while flying
Last edited by rajeevcm on 21 May 2010 08:39, edited 1 time in total.
Re: LCA news and discussion
the missing link is curve fitting, here is a simple analogy
if one wants to make a 30 degree right turn the car's drive wheel is not turned 30 degrees at instant zero instead it is left in a delta = say 3 degrees and over a small time period the needed 30 degree turn is made
so probably the FCS always follows a estimated projection which may be 0.5 secs into the future from this instant
if one wants to make a 30 degree right turn the car's drive wheel is not turned 30 degrees at instant zero instead it is left in a delta = say 3 degrees and over a small time period the needed 30 degree turn is made
so probably the FCS always follows a estimated projection which may be 0.5 secs into the future from this instant
Re: LCA news and discussion
I am sure it looks pretty, but it still does not support your viewpoint. Have you observed the wingtips when the plane touches down? They too vibrate at more than 2 Hz and look equally pretty. But what does that tell you about FCS?rajeevcm wrote: I dont know how many of you have observed the aileron's on an Airbus 320/340 when it is on the ground and is going through its built in test of the flight control software, you can see that the aileron deflects at a much higher rate than 2 hz. If you have not seen it next time you fly get a window seat near the wing and observe it, it looks really good
Re: LCA news and discussion
Shiv
Lets look at what I said. In the scenario that I presented the aircraft is sitting at the gate, there are no aerodynamic forces acting on the control surfaces, the only motion that the ailerons go through are due to the commands from the actuator and if they move at a faster rate than 2 hz this implies that the FCS is driving the surfaces at a rate greater than 2 hz.
What you are talking about is a scenario where aerodynamic forces are involved due to the forward velocity, with the wing generating lift, Now in order to keep the aircraft level while landing (in the absence of crosswind) the pilot uses the aileron (Most pilots actually disable the auto land capability at the decision altitude or higher and actually hand fly the plane to the ground if the conditions are VFR) This causes a reduction/increase (based on the direction of deflection of the aileron) in the lift at the wing tips which reduces/increases the lateral bending of the wing and once he changes his controls to go in the opposite direction the reverse actions this the reason that you see the wingtips oscillating and this happens on all aircraft even those without FBW if they have large wing spans
Lets look at what I said. In the scenario that I presented the aircraft is sitting at the gate, there are no aerodynamic forces acting on the control surfaces, the only motion that the ailerons go through are due to the commands from the actuator and if they move at a faster rate than 2 hz this implies that the FCS is driving the surfaces at a rate greater than 2 hz.
What you are talking about is a scenario where aerodynamic forces are involved due to the forward velocity, with the wing generating lift, Now in order to keep the aircraft level while landing (in the absence of crosswind) the pilot uses the aileron (Most pilots actually disable the auto land capability at the decision altitude or higher and actually hand fly the plane to the ground if the conditions are VFR) This causes a reduction/increase (based on the direction of deflection of the aileron) in the lift at the wing tips which reduces/increases the lateral bending of the wing and once he changes his controls to go in the opposite direction the reverse actions this the reason that you see the wingtips oscillating and this happens on all aircraft even those without FBW if they have large wing spans
-
vina
- BRF Oldie
- Posts: 6046
- Joined: 11 May 2005 06:56
- Location: Doing Nijikaran, Udharikaran and Baazarikaran to Commies and Assorted Leftists
Re: LCA news and discussion
Okay. Let me try again (it will be the last time). I think the part about it being instantaneous, random and time dependent went past you. I tried getting you to think how it could be done if instead of elevon deflections you put gas jets instead. Let me try something simpler.Now the scenario that you present about the deflections 0.8 seconds apart is worse than the 0.5 seconds since the elevator deflection changes after a time delay of 0.8 seconds which unfortunately is a large time delay and this would cause a departure from controlled flight
I assume you know how to ride a bicycle . A bicycle, just like the LCA is a statically unstable system,but dynamically stable system. At low speeds (higher speeds, it is stabilized by gyroscopic effects of the spinning wheels) how you stabilize the bike is that you lean your body left and right and turn the handle bars (steering angle) and ride in a stable upright position in a straight line!.
Now in a bicycle, how many times a second do you lean your body and turn the handle bars when riding in a straight line, even in a pretty bumpy and rough roads like in India?. After all, every single undulation should see you come crashing down . So why is it that you dont lean your body and turn handle multiple times a second (is it even possible for a human to do it if that is what is required?) . Ponder over this. If you can answer this question, you have found the answer for the LCA .
(hint, response time of the bike to an undulation is x sec and if your control response aka YOU can apply minor correction within x sec you are stable.. larger a bump, larger the response. and once you turn the handle, it comes back to straight ahead position , unless you want to keep turning, in which case, you simple turn handle back and forth around turn angle . In LCA, computer is equivalent to YOU on bike and elevons are equivalent of you leaning left and right and steering the handle)
-
vina
- BRF Oldie
- Posts: 6046
- Joined: 11 May 2005 06:56
- Location: Doing Nijikaran, Udharikaran and Baazarikaran to Commies and Assorted Leftists
Re: LCA news and discussion
Nope. I have flown window seats lots of times and seen ailerons and flaps and rudders and evelators deflecting. No way in hell do they can do 2 cycles per second (2 hz)!. The probably do couple of deflections per sec. But from + max to - max twice in one sec ?. Noyou can see that the aileron deflects at a much higher rate than 2 hz. If you have not seen it next time you fly get a window seat near the wing and observe it, it looks really good
Re: LCA news and discussion
Vina
The bicycle example is really good, the reason that most humans can ride a bicycle is due to the fact the time to double is really large and a human can perceive this divergence and apply correction before this divergence becomes too large.
In the LCA the time double is relatively short as compared to a bicycle so the FCS needs to perceive this divergence and apply a correction in a shorter time period after the occurrence of the disturbance. which brings me to my point that you need to deflect the elevons at a faster rate than just twice a second just to keep flying at the trim condition.
If the LCA is similar to the F-16, it is both statically and dynamically unstable, which would be the case if Cm_alpha is positive at least in certain flight conditions
The bicycle example is really good, the reason that most humans can ride a bicycle is due to the fact the time to double is really large and a human can perceive this divergence and apply correction before this divergence becomes too large.
In the LCA the time double is relatively short as compared to a bicycle so the FCS needs to perceive this divergence and apply a correction in a shorter time period after the occurrence of the disturbance. which brings me to my point that you need to deflect the elevons at a faster rate than just twice a second just to keep flying at the trim condition.
If the LCA is similar to the F-16, it is both statically and dynamically unstable, which would be the case if Cm_alpha is positive at least in certain flight conditions
Re: LCA news and discussion
Saar how did you find out that it was not the pilot making command movements faster than 2 Hz. Would you like to see a video of LCA Tejas making a full up-down control surface movement faster than 2 Hz while sitting on the ground before takeokff?rajeevcm wrote:Shiv
Lets look at what I said. In the scenario that I presented the aircraft is sitting at the gate, there are no aerodynamic forces acting on the control surfaces, the only motion that the ailerons go through are due to the commands from the actuator and if they move at a faster rate than 2 hz this implies that the FCS is driving the surfaces at a rate greater than 2 hz.
When the aircraft is sitting on the ground the FCS has no business playing with the control surfaces at a rate of even 1 HZ leave alone more than that. But the pilot needs to check his systems and does that.
Here is the video.
Watch carefully from 2 min 20 sec. The first down-up movement of the elevator occurs in about 0.6 seconds. 0.3 seconds per movement - 3 Hz. The movement down-up to neutral up and down again takes about 1.4 seconds Watch the ailerons again as the again as the plane takes off. Use a stopwatch or I will download the video convert to avi and tell you the number of frames it takes for the movement at 25 fps.
Re: LCA news and discussion
Maybe I need to get clarifications on some points
1) According to an earlier post "The control surfaces move a couple of times per second"
What I get from this is that the flight computer commands the elevon actuator every 0.5 seconds or say 0.6 seconds
I am assuming that this does not mean the elevons move from +ve max to -ve max in half a second
Is this right? If not I am sorry for spamming the forum
1) According to an earlier post "The control surfaces move a couple of times per second"
What I get from this is that the flight computer commands the elevon actuator every 0.5 seconds or say 0.6 seconds
I am assuming that this does not mean the elevons move from +ve max to -ve max in half a second
Is this right? If not I am sorry for spamming the forum
Re: LCA news and discussion
That is true for aircraft as well, but is more difficult (if not impossible) with unstable aircraft. So one would expect FBW to kick in when the pilot (or some external agent such as a gust) tends to cause a deviation from the parameters for safe flight. Now tell me why the FCS of a perfectly stable A 330 sitting on the ground would be making ailerons vibrate in a pretty dance? A dance that you need to describe as "proof of movement > 2Hz caused by FCS"? Do you really have to go to such extreme lengths to try and prove that AMR is wrong and you are correct?rajeevcm wrote:Vina
The bicycle example is really good, the reason that most humans can ride a bicycle is due to the fact the time to double is really large and a human can perceive this divergence and apply correction before this divergence becomes too large.
I mean I know you are knowledgeable - but you don't need to bullshit to save your echandee. On here you will get respect for your knowledge, not for H&D preserving masala.
Re: LCA news and discussion
Click on the image below for a scan the relevant page of AMR's bookrajeevcm wrote:Maybe I need to get clarifications on some points
1) According to an earlier post "The control surfaces move a couple of times per second"
What I get from this is that the flight computer commands the elevon actuator every 0.5 seconds or say 0.6 seconds
I am assuming that this does not mean the elevons move from +ve max to -ve max in half a second
Is this right? If not I am sorry for spamming the forum
That is all the information that is available to anyone. What conclusions you reach from it are yours and yours alone.

-
vina
- BRF Oldie
- Posts: 6046
- Joined: 11 May 2005 06:56
- Location: Doing Nijikaran, Udharikaran and Baazarikaran to Commies and Assorted Leftists
Re: LCA news and discussion
Yeah. That is what AM Rajkumar's figures match up. The time to double amplitude is around 0.5 secs, if I remember correctly , which is the natural dynamic frequency (and in resonance amplitude increases). Your control response aka should be faster than that . So that is the time at which the control system has to respond , which gives around 2 deflections in a full second.rajeevcm wrote:In the LCA the time double is relatively short as compared to a bicycle so the FCS needs to perceive this divergence and apply a correction in a shorter time period after the occurrence of the disturbance.
which brings me to my point that you need to deflect the elevons at a faster rate than just twice a second just to keep flying at the trim condition.
You need to SAMPLE the disturbance at at least twice the rate (whatever that Swedish named guy's theorem ) , but the response speed will not be that.
Unfortunately, I seriously doubt that part about "day in and out". Maybe you need to go back to basics and read up again on fundamental vibrations/acoustics, dynamic systems and control systems and revisit your models.Unfortunately I deal with FCS day in and day out both in simulations and on actual systems and that is why I am belaboring on the update rate since I have never been able to get away with a update rate less than 20Hz.
As a design engineer (not the control system guy), if someone control nut comes and tells me that he needs the elevator/elevon to be fluttering at some ridiculous 20HZ under any situation I will immediately say, NUTS.. XAFD@!#@!#@!, and I will immediately tweak the inertial response and damping in the system to get some sane figures which are realistic and implementable.
Re: LCA news and discussion
My two cents on the servo mechanism for FBW. The FWB is usually kept at a slower response than the input for a few reasons. The constraints and considerations are :-
1. if the response is too fast , the servo can become too responsive and goes into oscillations. Think of your old servo based voltage regulators, if the response is too fast the servo motor starts spinning for even minor spikes and is not needed.
2. if the response is two slow the servo might not be able to catch up to the stimulii. So the response has to be faster than an available control situation.
3. The mechanical response time. So even if you want to move the elevator say at 10 hz, would you be able to move a hydraulic motor at 10 hz ( can you imagine the elevator flapping at 10 times per second ? ...considering the audible sound waves start at 20hz ) ,
) ,
4. Even gentle nudges to the rudder do not need to be at 10 hz or even 1 hz for that matter. You are just making a flight trim and then even-ing the rudder out. So what kind of situation would need more than say 2 hz a FBW intervention ( before the pilot takes action anyways)...
1. if the response is too fast , the servo can become too responsive and goes into oscillations. Think of your old servo based voltage regulators, if the response is too fast the servo motor starts spinning for even minor spikes and is not needed.
2. if the response is two slow the servo might not be able to catch up to the stimulii. So the response has to be faster than an available control situation.
3. The mechanical response time. So even if you want to move the elevator say at 10 hz, would you be able to move a hydraulic motor at 10 hz ( can you imagine the elevator flapping at 10 times per second ? ...considering the audible sound waves start at 20hz
4. Even gentle nudges to the rudder do not need to be at 10 hz or even 1 hz for that matter. You are just making a flight trim and then even-ing the rudder out. So what kind of situation would need more than say 2 hz a FBW intervention ( before the pilot takes action anyways)...
Re: LCA news and discussion
You mean our good friend Mr. Nyquist , dont you ?vina wrote:
You need to SAMPLE the disturbance at at least twice the rate (whatever that Swedish named guy's theorem ) , but the response speed will not be that.
Vina , I just read your post and looks like a wrote the exact same thoughts , although totally independently.
Great minds thinking alike n stuff eh ?
Last edited by Vikram W on 21 May 2010 09:51, edited 1 time in total.
Re: LCA news and discussion
Shiv
Isn't it true that in FBW the control surfaces are commanded by the Flight control Computer so if the elevon actuator is effected only at 2 hz, even if the pilot moves the stick at a greater rate he will not get those deflections at a higher rate? Am I right in this?
In modern aircraft, where computers run most systems before leaving the gate they run through a series of Built in Test(BIT) the outcome of which is presented on the MFD for the pilot based on which the pilot makes a go or no go decision. It is only after this is done that the aircraft is cleared to taxi from the gate. During Taxi you will observe the pilot moving his control surfaces and check deflections this is a habit as this is drilled into you when you start flying lessons. If anybody can answer my previous post it would be really helpful
Also in straight and level flight, the control deflections are really small and are not discernible to the naked eye. if even in light turbulence if one needs large deflections this implies that the control power of the aircraft is not adequate. One can see the FCS in action only if one looks at the plots from on board data recording.
Isn't it true that in FBW the control surfaces are commanded by the Flight control Computer so if the elevon actuator is effected only at 2 hz, even if the pilot moves the stick at a greater rate he will not get those deflections at a higher rate? Am I right in this?
In modern aircraft, where computers run most systems before leaving the gate they run through a series of Built in Test(BIT) the outcome of which is presented on the MFD for the pilot based on which the pilot makes a go or no go decision. It is only after this is done that the aircraft is cleared to taxi from the gate. During Taxi you will observe the pilot moving his control surfaces and check deflections this is a habit as this is drilled into you when you start flying lessons. If anybody can answer my previous post it would be really helpful
Also in straight and level flight, the control deflections are really small and are not discernible to the naked eye. if even in light turbulence if one needs large deflections this implies that the control power of the aircraft is not adequate. One can see the FCS in action only if one looks at the plots from on board data recording.
Re: LCA news and discussion
Vina/Shiv and Others
I am not trying to prove that Air Marshal Rajkumar is wrong. I have a feeling that he intentionally did not give the correct update rate that is all.
I am not going to belittle anybody as I have insisted in all my posts about the air marshal that he knows what is right but does not want to share it in the public domain. if you follow my posts you will see that I never said that he is wrong and he dosent know what he is talking about.
I dont know what the update rate is nor am I going to tell you this is what it is, I just wanted to add my two cents regarding why I feel it has to be greater than 2 hz.
Vina it is great that you work in Aircraft Design. I am not trying to upset anybody, I am really sorry if I have. I am just trying to put forth my point of view with the little knowledge I have acquired while working on a research aircraft with FBW. Maybe the way we did it was wrong, Maybe the control algorithm we developed was more susceptible to time delays. I assumed that since the people I worked with in developing FBW were experts in this field, that they knew what they were talking about.
Anyhow sorry once again for all the posts. Let's agree to disagree
I am not trying to prove that Air Marshal Rajkumar is wrong. I have a feeling that he intentionally did not give the correct update rate that is all.
I am not going to belittle anybody as I have insisted in all my posts about the air marshal that he knows what is right but does not want to share it in the public domain. if you follow my posts you will see that I never said that he is wrong and he dosent know what he is talking about.
I dont know what the update rate is nor am I going to tell you this is what it is, I just wanted to add my two cents regarding why I feel it has to be greater than 2 hz.
Vina it is great that you work in Aircraft Design. I am not trying to upset anybody, I am really sorry if I have. I am just trying to put forth my point of view with the little knowledge I have acquired while working on a research aircraft with FBW. Maybe the way we did it was wrong, Maybe the control algorithm we developed was more susceptible to time delays. I assumed that since the people I worked with in developing FBW were experts in this field, that they knew what they were talking about.
Anyhow sorry once again for all the posts. Let's agree to disagree
Re: LCA news and discussion
oh we forgive u Rajeev 
Username changed to Vikram W.
Rahul.
Username changed to Vikram W.
Rahul.
Last edited by Rahul M on 21 May 2010 10:22, edited 1 time in total.
Reason: username changed.
Reason: username changed.
-
vina
- BRF Oldie
- Posts: 6046
- Joined: 11 May 2005 06:56
- Location: Doing Nijikaran, Udharikaran and Baazarikaran to Commies and Assorted Leftists
Re: LCA news and discussion
Yeah. Thanks. It was Mr Nyquist I was searching for. I forgot that name, but remember the key "take away".You mean our good friend Mr. Nyquist , dont you ?
Great minds thinking alike n stuff eh ?
:
Vina it is great that you work in Aircraft Design.
Are you serious here ?I am just trying to put forth my point of view with the little knowledge I have acquired while working on a research aircraft with FBW.
If you are, then you should definitely get some sanity check with numbers like 20Hz. Think of it. At that kind of frequency, any mechanical system probably have max amplitudes of a few millimeters /mill rads at most for it to have any sanity. Some high huge thing that deflects upwards of 40 /50 degs, flapping at 20 Hz!. If someone can engineer such a thing reliably point him to me, I will fall at his feet and do a full length "namaskaram".Maybe the way we did it was wrong, Maybe the control algorithm we developed was more susceptible to time delays. I assumed that since the people I worked with in developing FBW were experts in this field, that they knew what they were talking about.
Re: LCA news and discussion
Rajeev, I understand what you are saying. I believe what you are saying will work, at least in theory.
Your model is simple, find the instantaneous deviation, find the instantaneous correction. There is no reason why it shouldn't work as the deviation in control surfaces that would be required at 1/80th of a second would be very small!
What I am saying is don't take the correction decisions immediately. Analyze 40 sample sets (0.5 secs). This will give you a much better picture of the plane's deviation from desired path, which you can then correct in one stroke. Indeed this collective characterization of deviation and correction calculation will not be as simple as the correction calculation in your model. But then you would have 40 times the time to do it! One can clearly see the use of look up tables to gauge what the planes deviation pattern in the last 0.5 secs was and also the correction for the found pattern. Also notice that in this case the deviation of the control surfaces might be much larger than your model, but in one shot.
One more advantage is that instantaneous anomalies can be smothered out in this method.
By the way, Vina madam, your examples are just phenomenal.
P.S. and OT: I am sure you know what is a CPU cycle. A 2.6 GHz processor will have 2.6 * 10^9 cycles in one second. Hence running out of CPU cycles means running out of the CPUs execution power. It's Simple
Your model is simple, find the instantaneous deviation, find the instantaneous correction. There is no reason why it shouldn't work as the deviation in control surfaces that would be required at 1/80th of a second would be very small!
What I am saying is don't take the correction decisions immediately. Analyze 40 sample sets (0.5 secs). This will give you a much better picture of the plane's deviation from desired path, which you can then correct in one stroke. Indeed this collective characterization of deviation and correction calculation will not be as simple as the correction calculation in your model. But then you would have 40 times the time to do it! One can clearly see the use of look up tables to gauge what the planes deviation pattern in the last 0.5 secs was and also the correction for the found pattern. Also notice that in this case the deviation of the control surfaces might be much larger than your model, but in one shot.
One more advantage is that instantaneous anomalies can be smothered out in this method.
By the way, Vina madam, your examples are just phenomenal.
P.S. and OT: I am sure you know what is a CPU cycle. A 2.6 GHz processor will have 2.6 * 10^9 cycles in one second. Hence running out of CPU cycles means running out of the CPUs execution power. It's Simple
Last edited by Indranil on 21 May 2010 10:28, edited 1 time in total.
Re: LCA news and discussion
what would be the life of an actuator flapping the elevons at 20 Hz through angular amplitudes of 90deg or more ? a few hours ?

By the way Vina madam, your examples are just phenomenal.
Re: LCA news and discussion
I believe "maam" is working out a M&A proposal for Apple, AVIC1, HAL, armani, Gsachs and DuPont pointing out the strategic synergies and world beating innovative product collusion of the merged entity 
Re: LCA news and discussion
indranilroy wrote:By the way, Vina madam, your examples are just phenomenal.
Re: LCA news and discussion
If maam needs any surgical services for any reasons, I am at your cervix service.
Re: LCA news and discussion
Vina
One more post and that's it, when I say the update rate of 20Hz is required implies that the control surface deflections are going to be very small even in the range of a degree, because the error between desired and actual is going to be small and hence the corresponding deflection is going to be small, whereas if we wait for a longer time the error is large and hence needs a larger deflection to correct for error that builds up over time.
Unfortunately it is true I have worked with FBW aircraft both for my research and to feed myself. Right now I am back to doing full time research on advanced flight control concepts. I have no inkling when you guys talk about radars, engine inlet design rcs etc. The only thing that I have learnt is flight dynamics and control ( have had more courses in these than anything else). I have a report that talks about the f-8 fly-by-wire aircraft which mentions an update rate of 30 ms, but I need to read more than 197 pages of it to correctly identify if that is true and what they are talking about, I may put another post if I get any info as to whether the 30ms is right or 500ms is right but that would take a lot of time.
One more post and that's it, when I say the update rate of 20Hz is required implies that the control surface deflections are going to be very small even in the range of a degree, because the error between desired and actual is going to be small and hence the corresponding deflection is going to be small, whereas if we wait for a longer time the error is large and hence needs a larger deflection to correct for error that builds up over time.
Unfortunately it is true I have worked with FBW aircraft both for my research and to feed myself. Right now I am back to doing full time research on advanced flight control concepts. I have no inkling when you guys talk about radars, engine inlet design rcs etc. The only thing that I have learnt is flight dynamics and control ( have had more courses in these than anything else). I have a report that talks about the f-8 fly-by-wire aircraft which mentions an update rate of 30 ms, but I need to read more than 197 pages of it to correctly identify if that is true and what they are talking about, I may put another post if I get any info as to whether the 30ms is right or 500ms is right but that would take a lot of time.
Re: LCA news and discussion
No. That will be no good in an agile fighter. The control surfaces will do what the pilot wants as long as the resultant movements (of the aircraft) he commands do not cause a departure from the flight limitations set by the FCS. If his actions tend to exceed that the FCS will prevent the control surfaces from responding, but for the FCS to respond the sensors must first detect that the flight parameters (attitude, altitude, airspeed) are reaching their allowable limits.rajeevcm wrote:Shiv
Isn't it true that in FBW the control surfaces are commanded by the Flight control Computer so if the elevon actuator is effected only at 2 hz, even if the pilot moves the stick at a greater rate he will not get those deflections at a higher rate? Am I right in this?
Re: LCA news and discussion
Indranil,
I am not sure how much you follow flight control systems. But if you look into conference and journal papers most of them use control laws of the form Delta_e = r - Kx and this command delta_e is given to the elevator actuator each time this law gets executed in the computer. Most current flight control laws are of this form. There are benefits to doing this as the closed loop system has some nice properties in terms of Gain Margin/Phase margin etc.
I am not sure how much you follow flight control systems. But if you look into conference and journal papers most of them use control laws of the form Delta_e = r - Kx and this command delta_e is given to the elevator actuator each time this law gets executed in the computer. Most current flight control laws are of this form. There are benefits to doing this as the closed loop system has some nice properties in terms of Gain Margin/Phase margin etc.
Re: LCA news and discussion
Can anybody help me to post a scanned copy of some LCA simulation and flight test results. Searched online could not find how to do it
Re: LCA news and discussion
Ok I was somehow able to get the image scanned into photo bucket
here it is
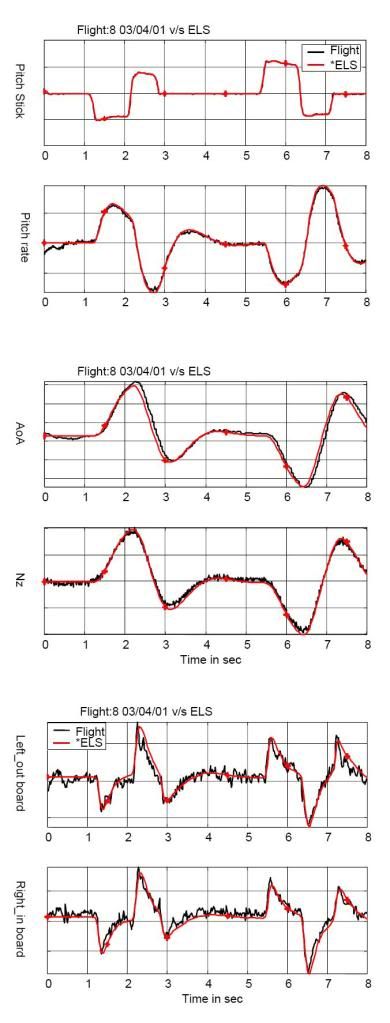
Source:"DESIGN, DEVELOPMENT AND FLIGHT TESTING OF CONTROL LAWS FOR THE INDIAN LIGHT COMBAT AIRCRAFT"
by Shyam Chetty, Flight Mechanics and Control Division, National Aerospace Laboratories, Bangalore 560 017,
Girish Deodhare, Centre for A. I. & Robotics, Raj Bhavan Circle, Bangalore 560 001, INDIA
and B.B. Misra, Former Research Test Pilot, Aeronautical Development Agency, Bangalore 560 017, INDIA
This appeared on AIAA Guidance, Navigation, and Control Conference and Exhibit, 5-8 August 2002, Monterey, California
here it is
Source:"DESIGN, DEVELOPMENT AND FLIGHT TESTING OF CONTROL LAWS FOR THE INDIAN LIGHT COMBAT AIRCRAFT"
by Shyam Chetty, Flight Mechanics and Control Division, National Aerospace Laboratories, Bangalore 560 017,
Girish Deodhare, Centre for A. I. & Robotics, Raj Bhavan Circle, Bangalore 560 001, INDIA
and B.B. Misra, Former Research Test Pilot, Aeronautical Development Agency, Bangalore 560 017, INDIA
This appeared on AIAA Guidance, Navigation, and Control Conference and Exhibit, 5-8 August 2002, Monterey, California
Re: LCA news and discussion
Hi all
I could not complete the earlier post as I had to run off to school for some work. A bit of background on the plots presented above, the red line is from the Iron bird simulation that was done at ADE while the black line is from actual flight test. The last two plots show the elevon deflection over time. One can see from these plots that the elevon position is updated more than twice or even thrice every second. It is difficult from the plots to ascertain the actual number of times per second the elevon position is updated.
I could not complete the earlier post as I had to run off to school for some work. A bit of background on the plots presented above, the red line is from the Iron bird simulation that was done at ADE while the black line is from actual flight test. The last two plots show the elevon deflection over time. One can see from these plots that the elevon position is updated more than twice or even thrice every second. It is difficult from the plots to ascertain the actual number of times per second the elevon position is updated.
Re: LCA news and discussion
^^^ I read the paper that you pointed out. I also read a few more papers cited in that paper. Alas, there seems to be no mention of the rates that we are speaking of. Does any body here know anybody from CLAW?!!! Rajeev, you yourself being from the control fields might know sombody
Also, this graph hardly has times when there is no pilot input and the pilot input seems to be a test square wave. The elevons have certainly followed the pilot's input almost instantaneously.Not once has there been a delay of 0.5 secs (which is obviously desired)!!! Of course this doesn't disprove the AM. He might have quoted the rates for stabilizing the flight. Pilot inputs can be treated as higher priority interrupts. The time between 3.5 to 5.5 seconds is where the elevons are trying to dampen the oscillation from nose down to level flight. Alas, we cant read anything out of that part.
[Speculation (has been on from a long time)]
Could the flight control be time-out based. The calculations are done at 80 htz, if no pilot input is noticed for 40 cycles, then the calculated correction (if required) is passed to the elevons. All I am contesting is that for a 10T plane (with relaxed stability) the correction for 0.5 seconds is still going to be pretty small for level flight (because the amplitude of the first oscillation should be pretty small). In case pilot input is noticed, correction + pilot input is calculated and applied, and the timer is reset!
This should justify both this graph and the what the AM said.
[Speculation off]
P.S. Rajeev, I am not questioning you. If you read my posts, at all times I have asked whether I am making sense or not! I don't understand control systems. I know about flight controls only as a hobby as I build and fly aeromodels. I would love to know what would be the frequency and amplitude of oscillations along the longitudinal axis of a plane like LCA without any correction?
Also, this graph hardly has times when there is no pilot input and the pilot input seems to be a test square wave. The elevons have certainly followed the pilot's input almost instantaneously.Not once has there been a delay of 0.5 secs (which is obviously desired)!!! Of course this doesn't disprove the AM. He might have quoted the rates for stabilizing the flight. Pilot inputs can be treated as higher priority interrupts. The time between 3.5 to 5.5 seconds is where the elevons are trying to dampen the oscillation from nose down to level flight. Alas, we cant read anything out of that part.
[Speculation (has been on from a long time)]
Could the flight control be time-out based. The calculations are done at 80 htz, if no pilot input is noticed for 40 cycles, then the calculated correction (if required) is passed to the elevons. All I am contesting is that for a 10T plane (with relaxed stability) the correction for 0.5 seconds is still going to be pretty small for level flight (because the amplitude of the first oscillation should be pretty small). In case pilot input is noticed, correction + pilot input is calculated and applied, and the timer is reset!
This should justify both this graph and the what the AM said.
[Speculation off]
P.S. Rajeev, I am not questioning you. If you read my posts, at all times I have asked whether I am making sense or not! I don't understand control systems. I know about flight controls only as a hobby as I build and fly aeromodels. I would love to know what would be the frequency and amplitude of oscillations along the longitudinal axis of a plane like LCA without any correction?
Re: LCA news and discussion
By the way, here is the reply from one of my friends, whom I inquired from. I don't know whether I should divulge his identity, but you can take it form me that he is a knowledgeable guy.
I will speak to few more guys. Will keep you guys updated with what I find out!In all real-life control systems (that includes FCS, formula one cars, spacecraft, rover landers etc) measurements arrive at a faster rate than the estimation + feedback control command can be synthesized by state-of-the-art micro-controllers. In other words, sensor's measurement frequency is higher than the computational frequency of the estimator + controller. This is routinely handled in the following way.
The thing to keep in mind is that "Don't waste the measurements". If you know how estimators (like Kalman filter) work, you may recall that these are predictor-corrector algorithms, where the prediction step is according to the dynamics and correction step is based on arrived measurements. In cases where measurements arrive at faster rate, only the update (the second step of estimator) step is done based on sensor readings, a control is synthesized and the command is sent only when its computation is done. Example below.
Example: Suppose you have a sensor whose measurement frequency is N Hz but your processor for estimator + controller runs at n Hz, where N > n. The new control command will be issued based on the full estimator algo ONLY at n Hz. However, the controls for intermediate times are NOT fixed. They are varied solely based on measurements. So you can think of it as having two controllers, one which is faster BUT "crude" controller (measurement based) and one which is slower BUT "sophisticated" controller (propagation + measurement based i.e. full estimator based). The crude one tuns in sync with the sensor rate. But once a better command is ready, the controller is switched and a "sophisticated" command is issued.
The above practice is done in almost all agile fighters and spacecrafts, which heavily depend on automatic control systems. As a matter of fact, a similar algo was hardware- implemented in the UAV AX1.
Re: LCA news and discussion
Indranil
What your friend says is right, even if the sensors update at N hz which is greater than the controller update rate n hz(as a rule of thumb this update frequency is taken as large as possible with the minimum recommended at 10 times the closed loop bandwidth of the control system) this does not cause a problem because we have the most recent value of the parameter being measured by the sensor. However if the update rate of the sensor is less than the controller update rate your control algorithm is now working on a delayed value and this is the bane of linear control theory, it can handle some delay but not an excessive amount. This is where hardware design comes into the picture you actually obtains sensors and for that matter the actuators keeping these in mind and this has a direct as well as the processor on which you want to run the controller and this has a direct relation to the cost of the system.
I understand the paper that I mentioned does not give the update rate , But in the book written by Air Marshal Rajkumar it says that the control surfaces move about a couple of times a second (Again I think it could be a typo on the publishers part and not on the part of AMR). If this were true the plot of the elevons would change values twice or maybe thrice every second the plots presented on the time scale above would show large amount of discontinuity.
The f-8c was the first aircraft on which the FBW was implemented and tested. The majority of testing was accomplished at Dryden Air force Base. I would like to quote an article on Dryden's website
One of my colleagues at school has worked on the f-16 FCS and he said that the update rate on the F-16 is around 50 Hz. I have searched on the Internet to get the correct value but have been unsucessful so far but I will keep looking.
What your friend says is right, even if the sensors update at N hz which is greater than the controller update rate n hz(as a rule of thumb this update frequency is taken as large as possible with the minimum recommended at 10 times the closed loop bandwidth of the control system) this does not cause a problem because we have the most recent value of the parameter being measured by the sensor. However if the update rate of the sensor is less than the controller update rate your control algorithm is now working on a delayed value and this is the bane of linear control theory, it can handle some delay but not an excessive amount. This is where hardware design comes into the picture you actually obtains sensors and for that matter the actuators keeping these in mind and this has a direct as well as the processor on which you want to run the controller and this has a direct relation to the cost of the system.
I understand the paper that I mentioned does not give the update rate , But in the book written by Air Marshal Rajkumar it says that the control surfaces move about a couple of times a second (Again I think it could be a typo on the publishers part and not on the part of AMR). If this were true the plot of the elevons would change values twice or maybe thrice every second the plots presented on the time scale above would show large amount of discontinuity.
The f-8c was the first aircraft on which the FBW was implemented and tested. The majority of testing was accomplished at Dryden Air force Base. I would like to quote an article on Dryden's website
the link for this article is http://www.nasa.gov/centers/dryden/abou ... -DFRC.htmlDFBW harnesses the speed and processing capabilities of digital computers to compensate for inherent instability. Computer software containing complex control laws is tailored to the aircraft's design and flight characteristics. The computerized flight control system silently and swiftly senses deviations from the desired flight path and automatically compensates -- as many as 40 commands a second -- to keep the aircraft in a stable environment. When the pilot wants to move the aircraft, control commands from the stick briefly "unlock" the artificial stability and the aircraft moves to a new course.
One of my colleagues at school has worked on the f-16 FCS and he said that the update rate on the F-16 is around 50 Hz. I have searched on the Internet to get the correct value but have been unsucessful so far but I will keep looking.
Last edited by rajeevcm on 22 May 2010 04:23, edited 1 time in total.
Re: LCA news and discussion
Hey Indranil
Just ask your friend what does he think about updating the elevons twice/thrice a second. I believe that you know him well and trust his judgment on matters related to control. Maybe he could then inform all of us through you what he thinks about this rate. I guess you would be more inclined to trust his views on the subject than mine and I am completely ok with that.
Just ask your friend what does he think about updating the elevons twice/thrice a second. I believe that you know him well and trust his judgment on matters related to control. Maybe he could then inform all of us through you what he thinks about this rate. I guess you would be more inclined to trust his views on the subject than mine and I am completely ok with that.
-
vina
- BRF Oldie
- Posts: 6046
- Joined: 11 May 2005 06:56
- Location: Doing Nijikaran, Udharikaran and Baazarikaran to Commies and Assorted Leftists
Re: LCA news and discussion
Desired?. By whom? You and rajeevcm? . When the pilot pulls a stick /kicks a rudder ,it better respond pronto. If there is a time lag of 0.5 to 1 sec between input and just start of activation, I doubt the pilot will be very pleased with it. After all, if that is the case, it will take a couple of secs (all things considered) before giving a command (like pulling back/pushing the stick) and the plane responding. Such a plane is definitely not going to be popular with any pilot civil or military, leave alone pilots of high performance fighter.The elevons have certainly followed the pilot's input almost instantaneously.Not once has there been a delay of 0.5 secs (which is obviously desired)!!!
I really dont understand what is it you guys are confused about. The control system loop/cycle will run at pretty high rate, but that doesn't mean that the actual elevons/rudders/other control surfaces by force have to move at the same rate!. I mentioned in my very first post on this that in the real world, there is damping and inertial forces, so the response of the system (LCA/ bicycle/ human walking on two legs) is much slower, so the control response rate will be just about at equivalent rates.
That is why I asked you the question, how do you know that the responses are not at 0.1 s and 0.8 s?. All in all, 2hz or whatever is probably not the MAx the system is designed for. But on an average (we are talking of stochastics here),it is going to be around that. Something like 20 hz or 50 hz as elevator flapping rates is ridiculous. There is no way anyone can engineer a large structure for that. That kind of rates are probably okay for a crystal in your wrist watch or the electricity in your power supply or other electrical and electronic systems. But for big,large mechanical systems,it is simply not on.
End of story. Dont worry, have curry. Have a nice tall glass of milk and sleep in peace.
Re: LCA news and discussion
Absolutely. I think it is best not to forget that over 90% of all aircraft that have flown from the time of the first flight have been flown this way. Even today I guesstimate that over 70% of all aircraft flying are still flown this way, and for India that includes the Kiran, Jaguar, MiG 21, MiG 27, MiG 29, An 32, Il-76 and Dornier.vina wrote: When the pilot pulls a stick /kicks a rudder ,it better respond pronto.
The pilot himself is the FCS system and his sensors are the seat of his pants, and his eyes. The only reason to bring in fly by wire was in the situations where seat of pants flying is known to fail, where sensors and a computer FCS commanded override of the flight controls can supercede pilot commands for greater safety.
There has been at least one crash of an aircraft where the FCS refused to allow the pilot to gain altitude and insisted that he was approaching for a landing - and that is the famous Le Bourget A 320 crash.
Another accident documented on video was the crash of a prototype Gripen because of FCS systems generated oscillations as it was landing. A video exists of that as well.
I think a great debate is going on about the merits and demerits of how much control the computer should have and how much the pilot should have and whether a manual override is necessary. An internet search will reveal many such debates/articles discussing the pros and cons quoted by each side.
Re: LCA news and discussion
Hi Vina/Shiv
Did you guys look at the link that I posted that talks about the F-8 FBW aircraft. It talks about the commands being generated by the FBW computer at the rate of 40 per second.
Vina From the plots shown Do you agree then that the elevator changes position at a rate greater than 2hz? That was my first post on this forum that this rate is too small and has to be greater that is all.
I did bring up the 20Hz update rate based on the experience I had with FBW aircraft ( Just for people interested google bonanaza + fly-by wire)
Did you guys look at the link that I posted that talks about the F-8 FBW aircraft. It talks about the commands being generated by the FBW computer at the rate of 40 per second.
Vina From the plots shown Do you agree then that the elevator changes position at a rate greater than 2hz? That was my first post on this forum that this rate is too small and has to be greater that is all.
I did bring up the 20Hz update rate based on the experience I had with FBW aircraft ( Just for people interested google bonanaza + fly-by wire)
Re: LCA news and discussion
Sorry rajeevcm - I am no longer interested in discussing this issue with you any further. Maybe the F 8 vibrates at 40 per second. The F-8 was a test bed and is out of active service. The LCA is flying today and the former chief test pilot wrote a book that said something that I choose to believe. I don't really care what the graph or your link says. Or even your stated conspiracy theory of why the chief test pilot may have said what he said. Please leave me out of this. I am not really interested in the extreme antics you are using to try and protect yourself and your math. This is the LCA thread.rajeevcm wrote:Hi Vina/Shiv
Did you guys look at the link that I posted that talks about the F-8 FBW aircraft. It talks about the commands being generated by the FBW computer at the rate of 40 per second.
I believe you would be better off bowing out with humility or coming up with references about the rate in some modern FBW aircraft and in the appropriate thread. Currently it is a toss up between your opinion and Air Marshal Rajkumar. I have already stated whom I choose to believe. Stating that you make a living out of FBW just does not cut it. You vocation is irrelevant here and earns you no extra brownies. You claim to know FBW but you do not seem to know some basic stuff about aircraft, which you tried to cover with an obvious bluff about the movement A 330 ailerons on the ground. With this being my stated opinion, I have no further desire to respond to your queries. You could redeem your reputation but I doubt if you are going to get very far by stuffing the LCA thread with your math.
-
vina
- BRF Oldie
- Posts: 6046
- Joined: 11 May 2005 06:56
- Location: Doing Nijikaran, Udharikaran and Baazarikaran to Commies and Assorted Leftists
Re: LCA news and discussion
Is it just me , or is it the entire younger generation these days (there was a "graph" problem in the GSLV thread too) has totally lost the ability to read and analyze graphs and make any sense out of it.?Vina From the plots shown Do you agree then that the elevator changes position at a rate greater than 2hz?
From the graphs you posted, all that I can conclude is that the FBW laws are very accurately close to real world and in fact,the guys who created those FBW laws should be totally complemented. The FBW law design calls for at most 2 to 3 deflections in a second and I dont see anything in the graph that contradicts it!.
As for the "serrated edges" of the lines in "real world" , how did you actually jump straight to the conclusion that it was the flight computer that actually made those commands, the system responded and got captured in the readings?. If anyone shows me the result of a experiment as a nice smooth line without fitting and approximation, it is either a fake or scaled out to such an extent that the experiment errors are smoothened out!. From the scale of the graph , it is apparent that these are well within experimental error /instrument error and random noise ranges!.
As an exercise, why dont you fit a nice smooth line through the serrations/variations in "real world" and then tell me how it holds up to your conclusion that it should be 20 hz!.
Sorry, you are totally confused between the actual response rate of the control systems and the cycle speed of the control system. It doesn't stand to basic engineering reason in my opinon and fails basic sanity checks.That was my first post on this forum that this rate is too small and has to be greater that is all.
I did bring up the 20Hz update rate based on the experience I had with FBW aircraft ( Just for people interested google bonanaza + fly-by wire)
Like I said, for "google bonanaza + fly by wire" has a control surface that flaps at 20 hz, get me his name and show me a video of it flapping at that rate and I will build a shrine for him and elevate him from being a mere mortal to a saint/immortal in aerospace engg.
Re: LCA news and discussion
My response hereLike I said, for "google bonanaza + fly by wire" has a control surface that flaps at 20 hz, get me his name and show me a video of it flapping at that rate and I will build a shrine for him and elevate him from being a mere mortal to a saint/immortal in aerospace engg.
http://forums.bharat-rakshak.com/viewto ... 03#p875803